
Productive Robotics
WebSocket Memory Leak Fix
Diagnosed and fixed a safety-critical multi-layer cascading failure in production where a frontend issue could ultimately surface as a physical fault event. The class of cross-layer systems debugging needed wherever a software bug can cascade into a physical safety event.
Traced a production issue where a frontend resource leak triggered by intermittent network disconnects in industrial environments would eventually cascade through the middleware and surface as a physical fault. The failure chain spanned several abstraction layers — frontend, browser runtime, safety middleware — making the root cause invisible from any single vantage point.
Root cause analysis uncovered several compounding issues that combined to make the leak silent: scoping problems that masked cleanup errors, incorrect object references that made unsubscribe calls no-ops, and a prior fix attempt that had inadvertently disabled library-internal reconnection handling. Each individual issue was minor; together they produced a slow leak with no observable signal.
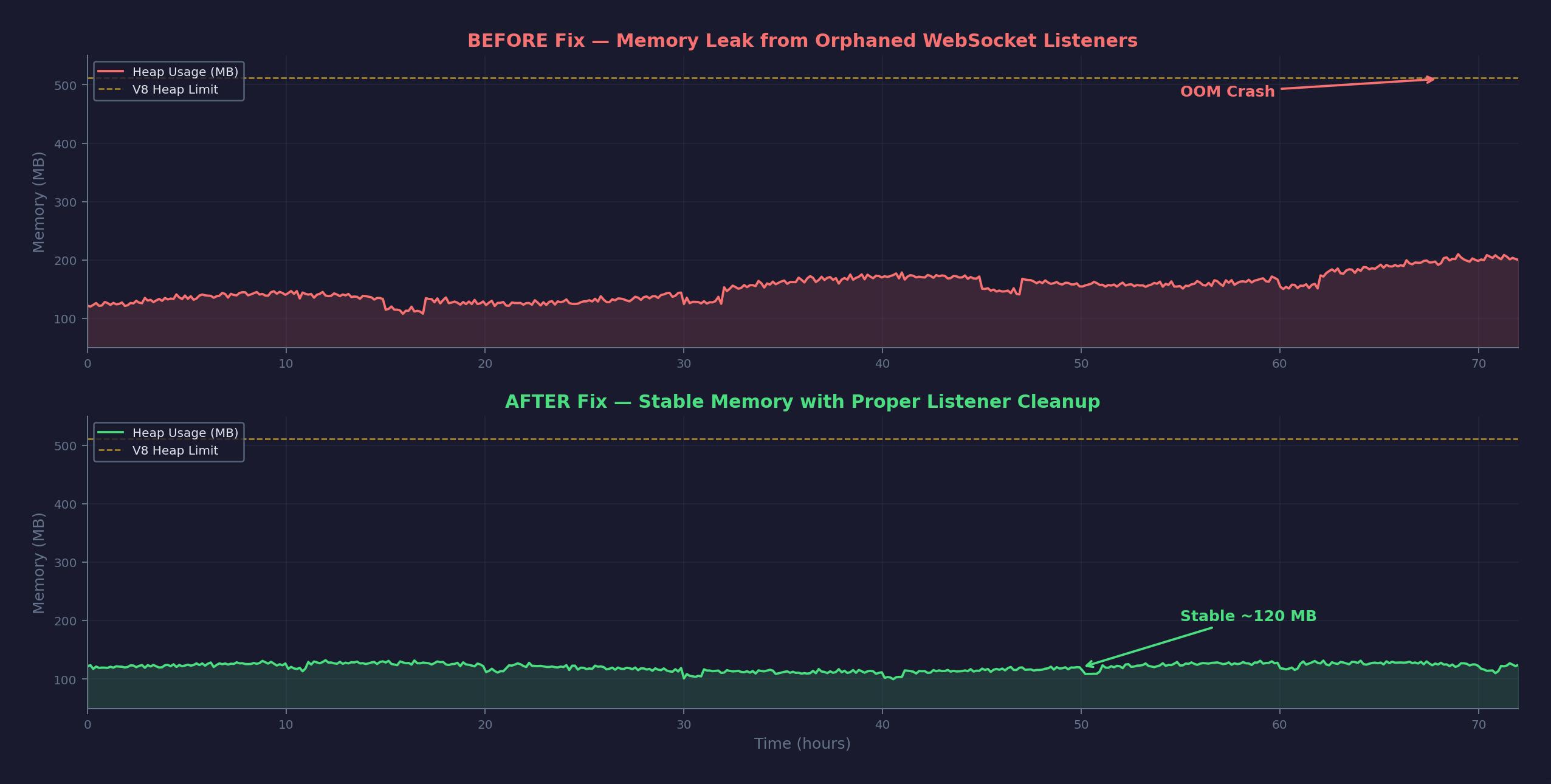
Built custom diagnostic instrumentation by wrapping library internals to add observability without modifying source code — a standard diagnostic pattern for debugging third-party library behavior in production. This made the previously invisible accumulation quantifiable.
The fix restored proper subscription lifecycle handling without disrupting the library's internal reconnection logic. The debugging methodology — tracing a symptom backward through multiple abstraction layers to reach a root cause far from the visible failure — demonstrates the cross-layer systems thinking required for safety-critical robotics software.